We present the MARBLE SubT Finals dataset. It consists of sensor data, recorded in the DARPA SubT Finals competition course, setup in the Kentucky Megacavern. The data specificallyincldues 3D lidar from an Ouster OS1-64 beam lidar, IMU, and RGB camera data. The full dataset, including sensor data, calibration sequences, and evaluation scripts can be downloaded here.
Downloads
| File | Agent | Size [GB] | Length (hh:mm:ss) |
|---|---|---|---|
| Base Station Screen Capture 10X (Video) | BS | 0.1 | 00:06:08 |
| Base Station Data (Rosbag) | BS | 20.9 | 01:08:48 |
| D02 FPV Footage 5X (Front Video, Left Video, Right Video) | D02 | 0.1 | 00:14:04 |
| D02 Output Data (Rosbag) | D02 | 12.3 | 01:18:03 |
| D02 FPV Data (Rosbag) | D02 | 11.6 | 01:18:40 |
| D01 FPV Footage 5X (Front Video, Left Video, Right Video) | D01 | 0.1 | 00:14:04 |
| D01 Output Data (Rosbag) | D01 | 8.3 | 01:07:28 |
| D01 FPV Data (Rosbag) | D01 | 6.7 | 00:45:35 |
| H02 FPV Footage 5X (Front Video) | H02 | 0.1 | 00:07:07 |
| H02 Output Data (Rosbag) | H02 | 6.5 | 00:40:00 |
| H02 FPV Data (Rosbag) | H02 | 2.0 | 00:39:44 |
| H01 FPV Footage 5X (Front Video) | H01 | 0.1 | 00:13:51 |
| H01 Output Data (Rosbag) | H01 | 10.2 | 01:17:45 |
| H01 FPV Data (Rosbag) | H01 | 3.8 | 01:17:27 |
Platforms
 |
 |
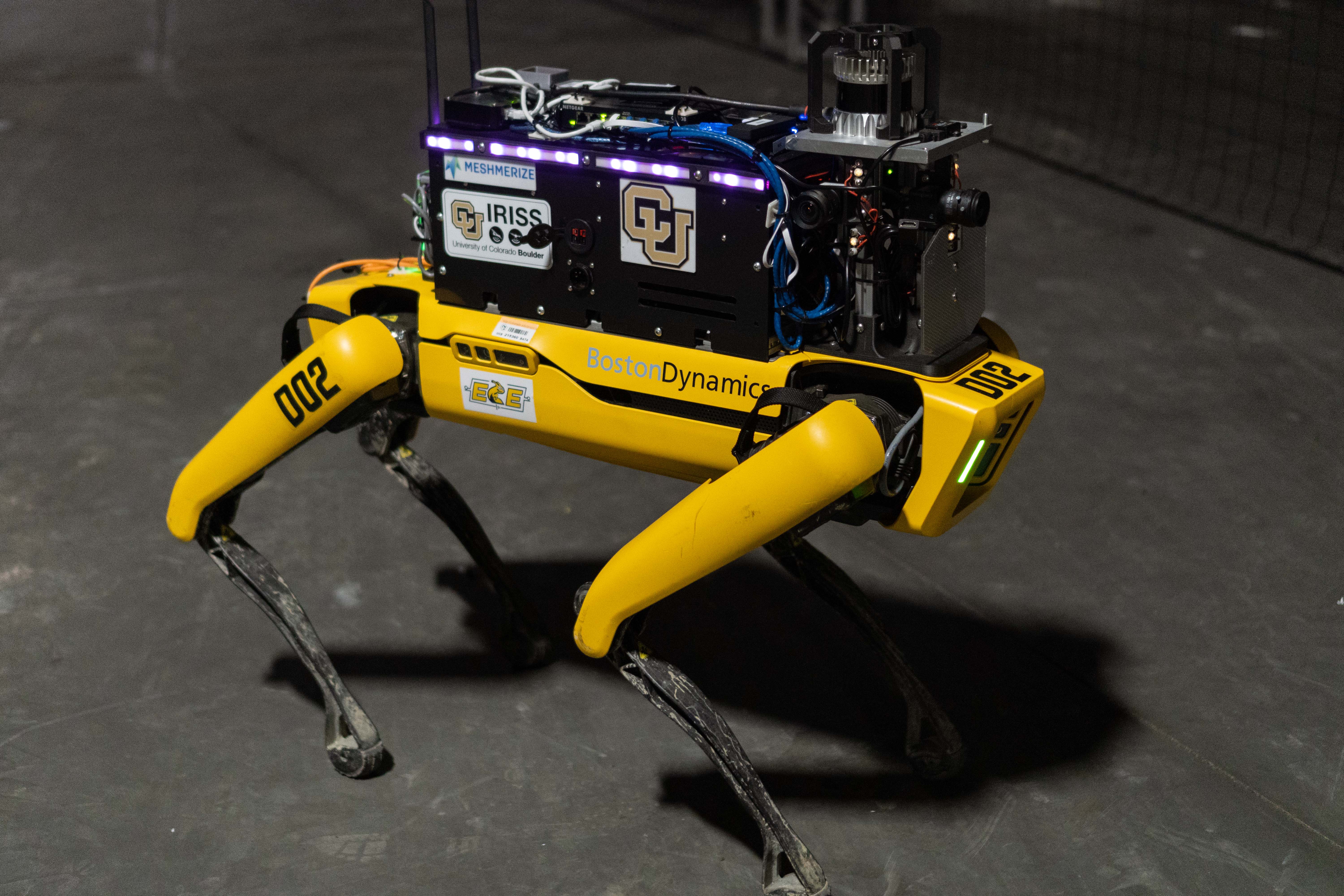
The Spot Platform (left) contains the following components:
- Lidar Sensor: Ouster OS1; 10Hz; 64 beams; 1-degree angular accuracy; angular resolution 0.35-degree horizontal, 0.7-degree vertical; 3cm range accuracy; field of view 360-degree horizontal, 45-degree vertical; max range 120m; 65,536 points per scan
- IMU: Lord Microstrain 3DM-GX5-25; 300Hz
- Cameras:
The Husky Platform (right) contains the following componenets:
- Lidar Sensor: Ouster OS1; 10Hz; 64 beams; 1-degree angular accuracy; angular resolution 0.35-degree horizontal, 0.7-degree vertical; 3cm range accuracy; field of view 360-degree horizontal, 45-degree vertical; max range 120m; 65,536 points per scan
- IMU: Lord Microstrain 3DM-GX5-25; 300Hz
- Cameras:
License
This dataset is released under the Apache 2.0 license.
CITATION
Team MARBLE has submitted a special issues paper to the Field Robotics Journal titled “Flexible Supervised Autonomy for Exploration in Subterranean Environments,” which is current in review.