ColoRadar+: An extension of the dense millimeter-wave radar dataset ColoRadar
Kyle Harlow
Doncey Albin
Kristen Such
Miles Mena
Dusty Woods
Anna Zavei-Boroda
Christoffer Heckman
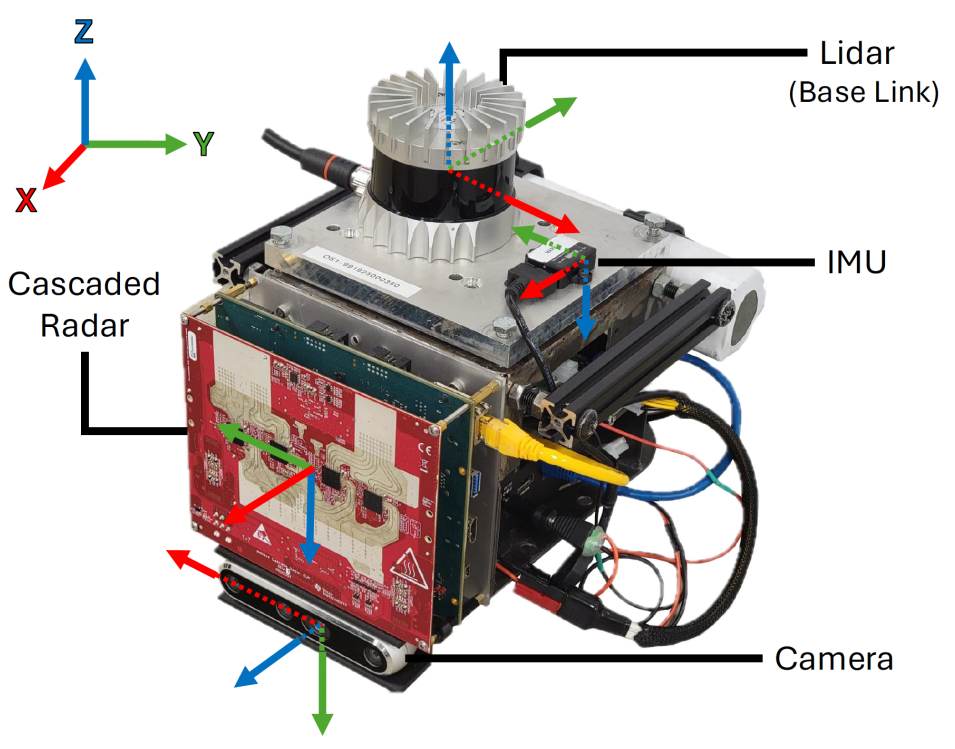
Millimeter-Wave (mmWave) Radar has become a compelling alternative sensor for odometry and mapping in visually degraded environments due to the longer-wavelength’s ability to bypass particles which interrupt visual and near-visual sensors.
However, the low resolutions, especially in angular dimensions, and sparse nature of many mmWave radars make accurate odometry difficult. In order to promote continued research in this area, we present ColoRadar+. Coloradar+ is an extension of the ColoRadar Dataset which includes improved ground truth odometry, and RGB-D camera data not included in the original dataset. We also propose a data-driven radar-inertial odometry network, which leverages a dense radar image front-end to compensate for some of the perceived drawbacks of mmWave radar. We train and test this network on a new mmWave radar dataset, ColoradarPlus.
Dataset
If you would like to download the ColoRadar+ Dataset or specific runs from environments, you can do so here: (DOWNLOAD)
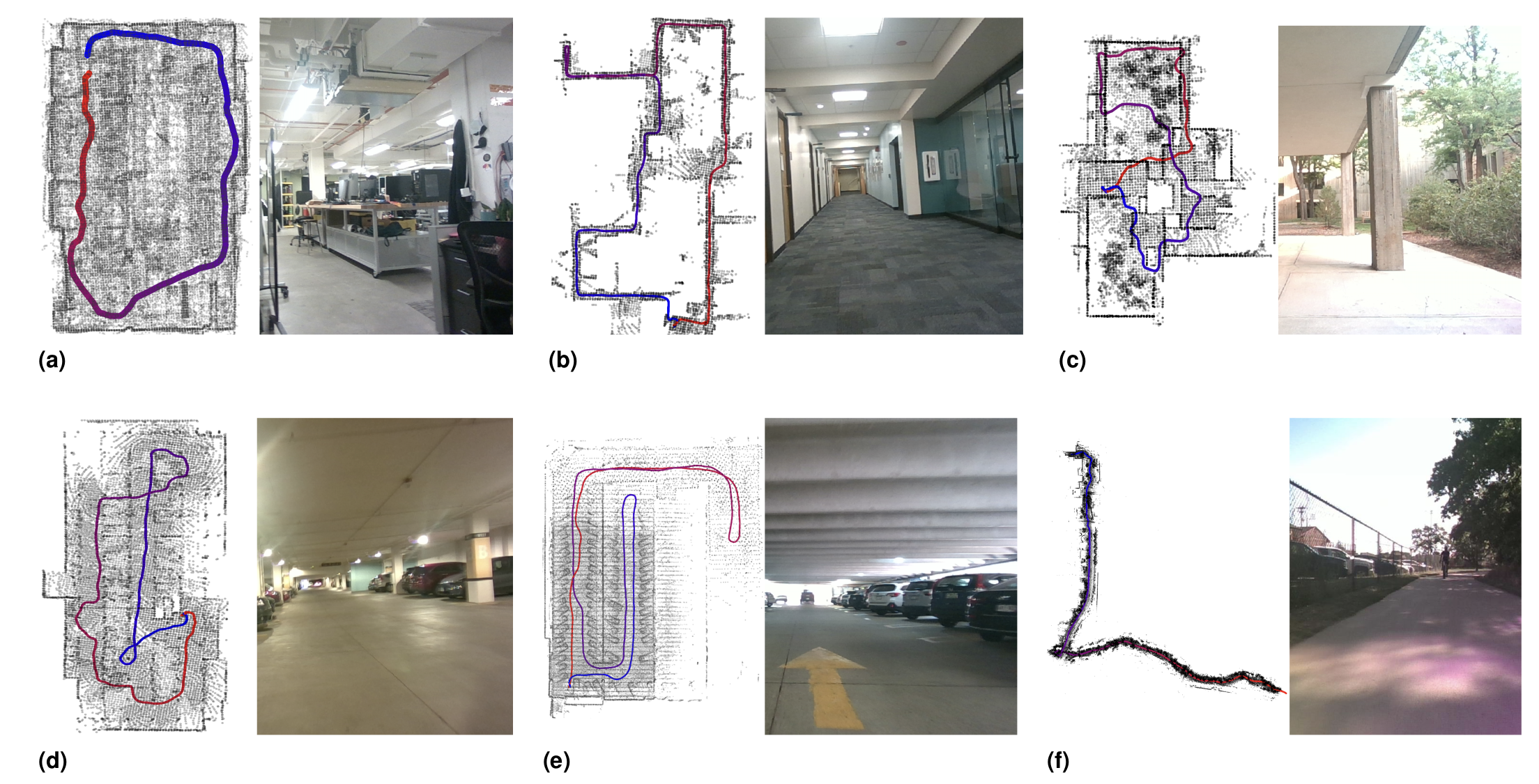
 We collected the ColoradarPlus dataset across a diverse set of urban environments, in and around the University of Colorado - Boulder campus. We maintained recording in the indoor building environments of the Intelligent Robotics Laboratory (IRL), and Engineering Center Hallways (EC). We also capture outdoor data within the Engineering Center Courtyard (courtyard), and a fast-moving collection along Boulder Creek Path and across the University of Colorado- Boulder Campus, where the sensor-rig was attached to the back of an electrical bicycle (ebike). Lastly we collect data in two different parking garages the Center For Community parking garage (C4C), an underground parking lot with solid concrete walls and Regent Parking Garage (regent), an above ground parking lot with multiple levels. Each of these environments are detailed below.
We collected the ColoradarPlus dataset across a diverse set of urban environments, in and around the University of Colorado - Boulder campus. We maintained recording in the indoor building environments of the Intelligent Robotics Laboratory (IRL), and Engineering Center Hallways (EC). We also capture outdoor data within the Engineering Center Courtyard (courtyard), and a fast-moving collection along Boulder Creek Path and across the University of Colorado- Boulder Campus, where the sensor-rig was attached to the back of an electrical bicycle (ebike). Lastly we collect data in two different parking garages the Center For Community parking garage (C4C), an underground parking lot with solid concrete walls and Regent Parking Garage (regent), an above ground parking lot with multiple levels. Each of these environments are detailed below.
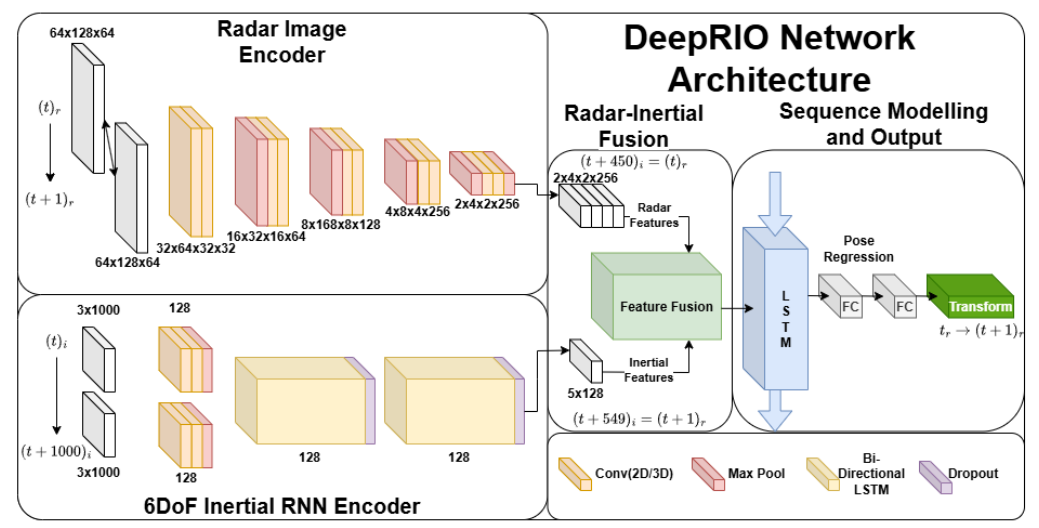
DeepRIO
We create a fusion architecture, DeepRIO, similar to Chen et al. (2019); Lu et al. (2020) which employs a first-of-its-kind dense 3D convolutional encoder network styled similarly to Wang et al. (2017) between two radar-images and a 6DoF inertial network Silva do Monte Lima et al. (2019) to track odometry.
Presentation Video
Citation
@article{Harlow2024ARXIV,
title = {ColoRadar+: An extension of the dense millimeter-wave radar dataset ColoRadar},
author = {Kyle Harlow, Doncey Albin, Kristen Such, Miles Mena, Dusty Woods, Anna Zavei-Boroda, Christoffer Heckman},
journal = {arXiv preprint arXiv:####.#####},
year = {2025},
}