We present the Colorado mm-Wave Radar (ColoRadar) dataset. It consists of 52 sequences, recorded in mines, built environments, and in an urban creek path, totaling more than 145 minutes of 3D FMCW radar, 3D lidar, and IMU data. The full dataset, including sensor data, calibration sequences, and evaluation scripts can be downloaded here.
For an explanation video of this dataset, please click the linked image below:
Downloads
Click here to navigate and download files from the ColoRadar dataset.
We have organized our dataset using the Automous Systems Lab (ASL) dataset format, though our dataset additionally provides files for the photometric camera calibration and light calibration. Each sequence is available at full-resolution and separated into its own zip file.
| Sequence Name | Length (seconds) | comment |
|---|---|---|
| 12_21_2020_ec_hallways_run0 | 104 | Indoor built environment |
| 12_21_2020_ec_hallways_run1 | 179 | Indoor built environment |
| 12_21_2020_ec_hallways_run2 | 284 | Indoor built environment |
| 12_21_2020_ec_hallways_run3 | 250 | Indoor built environment |
| 12_21_2020_ec_hallways_run4 | 90 | Indoor built environment |
| 12_21_2020_arpg_lab_run0 | 120 | Indoor built environment |
| 12_21_2020_arpg_lab_run1 | 118 | Indoor built environment |
| 12_21_2020_arpg_lab_run2 | 101 | Indoor built environment |
| 12_21_2020_arpg_lab_run3 | 143 | Indoor built environment |
| 12_21_2020_arpg_lab_run4 | 142 | Indoor built environment |
| 2_28_2021_outdoors_run0 | 110 | Outdoor built environment |
| 2_28_2021_outdoors_run1 | 122 | Outdoor built environment |
| 2_28_2021_outdoors_run2 | 131 | Outdoor built environment |
| 2_28_2021_outdoors_run3 | 133 | Outdoor built environment |
| 2_28_2021_outdoors_run4 | 109 | Outdoor built environment |
| 2_28_2021_outdoors_run5 | 124 | Outdoor built environment |
| 2_28_2021_outdoors_run6 | 110 | Outdoor built environment |
| 2_28_2021_outdoors_run7 | 109 | Outdoor built environment |
| 2_28_2021_outdoors_run8 | 103 | Outdoor built environment |
| 2_28_2021_outdoors_run9 | 121 | Outdoor built environment |
| 2_24_2021_aspen_run0 | 87 | Large motion capture space |
| 2_24_2021_aspen_run1 | 91 | Large motion capture space |
| 2_24_2021_aspen_run2 | 108 | Large motion capture space |
| 2_24_2021_aspen_run3 | 125 | Large motion capture space |
| 2_24_2021_aspen_run4 | 85 | Large motion capture space |
| 2_24_2021_aspen_run5 | 91 | Large motion capture space |
| 2_24_2021_aspen_run6 | 116 | Large motion capture space |
| 2_24_2021_aspen_run7 | 107 | Large motion capture space |
| 2_24_2021_aspen_run8 | 103 | Large motion capture space |
| 2_24_2021_aspen_run9 | 83 | Large motion capture space |
| 2_24_2021_aspen_run10 | 152 | Large motion capture space |
| 2_24_2021_aspen_run11 | 126 | Large motion capture space |
| 2_23_2021_edgar_classroom_run0 | 187 | Narrow subterranean environment |
| 2_23_2021_edgar_classroom_run1 | 171 | Narrow subterranean environment |
| 2_23_2021_edgar_classroom_run2 | 197 | Narrow subterranean environment |
| 2_23_2021_edgar_classroom_run3 | 276 | Narrow subterranean environment |
| 2_23_2021_edgar_classroom_run4 | 163 | Narrow subterranean environment |
| 2_23_2021_edgar_classroom_run5 | 166 | Narrow subterranean environment |
| 2_23_2021_edgar_army_run0 | 478 | Large subterranean environment |
| 2_23_2021_edgar_army_run1 | 236 | Large subterranean environment |
| 2_23_2021_edgar_army_run2 | 144 | Large subterranean environment |
| 2_23_2021_edgar_army_run3 | 245 | Large subterranean environment |
| 2_23_2021_edgar_army_run4 | 303 | Large subterranean environment |
| 2_23_2021_edgar_army_run5 | 114 | Large subterranean environment |
| 2_22_2021_longboard_run0 | 207 | High-speed multi-use paths and roads |
| 2_22_2021_longboard_run1 | 177 | High-speed multi-use paths and roads |
| 2_22_2021_longboard_run2 | 271 | High-speed multi-use paths and roads |
| 2_22_2021_longboard_run3 | 331 | High-speed multi-use paths and roads |
| 2_22_2021_longboard_run4 | 198 | High-speed multi-use paths and roads |
| 2_22_2021_longboard_run5 | 239 | High-speed multi-use paths and roads |
| 2_22_2021_longboard_run6 | 228 | High-speed multi-use paths and roads |
| 2_22_2021_longboard_run7 | 262 | High-speed multi-use paths and roads |
| calib | Calibration and config parameters | |
| development tools | Example Python and MATLAB scripts | |
| ros msg definitions | ROS message definitions for bag files |
Sensor Rig
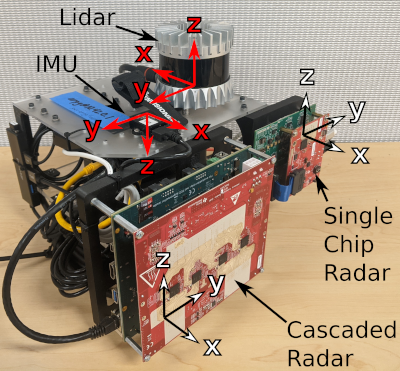
The sensor rig contains the following components:
- Cascaded Imaging Radar Sensor: Texas Instruments MMWCAS-RF-EVM
- Single Chip Radar Sensor: Texas Instruments AWR1843BOOST-EVM paired with a DCA1000-EVM for raw data capture
- Lidar Sensor: Ouster OS1; 10Hz; 64 beams; 1-degree angular accuracy; angular resolution 0.35-degree horizontal, 0.7-degree vertical; 3cm range accuracy; field of view 360-degree horizontal, 45-degree vertical; max range 120m; 65,536 points per scan
- IMU: Lord Microstrain 3DM-GX5-25; 300Hz
Evaluation
To be included.
Calibration
We additionally include a decluttering calibration dataset, so that radar calibration models may be inferred.
License
This dataset is released under the Apache 2.0 license.
CITATION
When citing our work, please use:
Kramer, Andrew, Kyle Harlow, Christopher Williams, and Christoffer Heckman. “ColoRadar: The direct 3D millimeter wave radar dataset.” The International Journal of Robotics Research 41, no. 4 (2022): 351-360.